Sistem bilangan adalah kode atau simbol yang digunakan untuk menerangkan sejumlah hal secara detail.
Sistem bilangan adalah bahasa yang berisi satu set pesan simbul-simbul yang berupa angka dengan batasan untuk operasi aritmatika penjumlahan, perkalian dan yang lainnya. Pada sistem bilangan terdapat bilangan integer dan bilangan pecahan dengan titik radix “.”.

2.1. Sistem Bilangan Biner
Sistem bilangan biner adalah suatu sistem atau cara menghitung bilangan dengan hanya menggunakan dua simbol angka yaitu ‘0’ dan ‘1’, bilangan ini sering disebut dengan sistem bilangan berbasis atau radix 2 .
Sistem bilangan biner digunakan untuk mempresentasikan alat yang mempunyai dua keadaan operasi yang dapat dioperasikan dalam dua keadaan ekstrim.
Contoh switch dalam keadaan terbuka atau tertutup, lampu pijar dalam keadaan terang atau gelap, dioda dalam keadaan menghantar atau tidak menghantar, transistor dalam keadaan cut off atau saturasi, fotosel dalam keadaan terang atau gelap, thermostat dalam keadaan terbuka atau tertutup, Pita magnetik dalam keadaan magnet atau demagnet.
2.2. Sistem Bilangan Desimal.
Sistem bilangan desimal adalah suatu sistem atau cara menghitung bilangan dengan menggunakan sepuluh simbol angka yaitu ‘0’ ,‘1’, ‘2’,’3’,’4’,’5’,’6’,’7’,’8’ dan ‘9’ bilangan ini sering disebut dengan sistem bilangan berbasis atau radix 10.
Sistem bilangan desimal kurang cocok digunakan untuk sistem digital karena sangat sulit merancang pesawat elektronik yang dapat bekerja dengan 10 level (tiap-tiap level menyatakan karakter desimal mulai 0 sampai 9).
Sistem bilangan desimal adalah positional-value system,dimana nilai dari suatu digit tergantung dari posisinya.
Nilai yang terdapat pada kolom ketiga pada Tabel 2.1., yaitu A, disebut satuan, kolom kedua yaitu B disebut puluhan, C disebut ratusan, dan seterusnya.
Kolom A, B, C menunjukkan kenaikan pada eksponen dengan basis 10 yaitu 100 = 1, 101 = 10, 102 = 100. Dengan cara yang sama, setiap kolom pada sistem bilangan biner yang berbasis 2, menunjukkan eksponen dengan basis 2, yaitu 20 = 1, 21 = 2, 22 = 4, dan seterusnya.
Tabel 2.1. Nilai Bilangan Desimal dan Biner

Setiap digit biner disebut bit; bit paling kanan disebut least significant bit (LSB), dan bit paling kiri disebut most significant bit (MSB).
Untuk membedakan bilangan pada sistem yang berbeda digunakan subskrip.
Sebagai contoh 910 menyatakan bilangan sembilan pada sistem bilangan desimal, dan 011012 menunjukkan 01101 pada sistem bilangan biner.
Subskrip tersebut sering diabaikan jika sistem bilangan yang dipakai sudah jelas.
2.3. Sistem Bilangan Oktal.
Sistem bilangan oktal adalah suatu sistem atau cara menghitung bilangan dengan menggunakan delapan simbol angka yaitu ‘0’ ,‘1’, ‘2’,’3’,’4’,’5’,’6’,dan ’7’ bilangan ini sering disebut dengan sistem bilangan berbasis atau radix 8. Sistem bilangan oktal digunakan sebagai alternatif untuk menyederhanakan sistem pengkodean biner.
Karena 8 = 23, maka satu (1) digit oktal dapat mewakili tiga (3) digit biner.
2.4. Sistem Bilangan Heksadesimal.
Sistem bilangan heksadesimal adalah suatu sistem atau cara menghitung bilangan dengan menggunakan 16 simbol yaitu ‘0’ ,‘1’, ‘2’,’3’,’4’,’5’,’6’,’7’,’8’,’9’,
’A’,’B’, ’C’,’D’,’E’, dan ‘F’ bilangan ini sering disebut dengan sistem bilangan berbasis atau radix 16.
Identik dengan sistem bilangan oktal, sistem bilangan heksadesimal juga digunakan untuk alternatif penyederhanaan sistem pengkodean biner.
Karena 16 = 24, maka satu (1) digit heksadesimal dapat mewakili empat (4) digit biner.
2.5. Konversi Bilangan
2.5.1. Konversi bilangan desimal ke biner.
Cara untuk mengubah bilangan desimal ke biner adalah dengan membagi bilangan desimal yang akan diubah, secara berturut-turut dengan pembagi 2, dengan memperhatikan sisa pembagiannya.
Sisa pembagian akan bernilai 0 atau 1, yang akan membentuk bilangan biner dengan sisa yang terakhir menunjukkan MSBnya.
Sebagai contoh, untuk mengubah 5210 menjadi bilangan biner, diperlukan langkah-langkah berikut :
52/2 = 26 sisa 0, LSB
26/2 = 13 sisa 0
13/2 = 6 sisa 1
6/2 = 3 sisa 0
3/2 = 1 sisa 1
½ = 0 sisa 1, MSB
Sehingga bilangan desimal 5210 dapat diubah menjadi bilangan biner 1101002.
Cara di atas juga bisa digunakan untuk mengubah sistem bilangan yang lain, yaitu oktal atau heksadesimal.
Tabel 2.2. Daftar Bilangan Desimal dan Bilangan Biner Ekivalensinya

2.5.2. Konversi bilangan desimal ke oktal.
Teknik pembagian yang berurutan dapat digunakan untuk mengubah bilangan desimal menjadi bilangan oktal.
Bilangan desimal yang akan diubah secara berturut-turut dibagi dengan 8 dan sisa pembagiannya harus selalu dicatat.
Sebagai contoh, untuk mengubah bilangan 581910 ke oktal, langkah-langkahnya adalah :
5819/8 = 727, sisa 3, LSB
727/8 = 90, sisa 7
90/8 = 11, sisa 2
11/8 = 1, sisa 3
1/8 = 0, sisa 1, MSB
Sehingga 581910 = 132738
2.5.3. Konversi bilangan desimal ke heksadesimal.
Teknik pembagian yang berurutan dapat juga digunakan untuk mengubah bilangan desimal menjadi bilangan heksadesimal.
Bilangan desimal yang akan diubah secara berturut-turut dibagi dengan 16 dan sisa pembagiannya harus selalu dicatat.
Sebagai contoh, untuk mengubah bilangan 340810 menjadi bilangan heksadesimal, dilakukan dengan langkah-langkah sebagai berikut :
3409/16 = 213, sisa 110 = 116, LSB
213/16 = 13, sisa 510 = 516
13/16 = 0, sisa 1310 = D16, MSB
Sehingga, 340910 = D5116.
2.5.4. Konversi bilangan biner ke desimal.
Seperti yang terlihat pada tabel 2.1. sistem bilangan biner adalah suatu sistem posisional dimana tiap-tiap digit (bit) biner mempunyai bobot tertentu berdasarkan atas posisinya terhadap titik biner seperti yang ditunjukkan pada tabel 2.3.
Tabel 2.3. Daftar Bobot tiap bit Bilangan Biner dan Ekivalensinya dalam desimal

Oleh karena itu bilangan biner dapat dikonversikan ke bilangan desimal dengan cara menjumlahkan bobot dari masing-masing posisinya yang bernilai 1.
Sebagai contoh, untuk mengubah bilangan biner 1100112 menjadi bilangan desimal dapat dilakukan sebagai berikut:
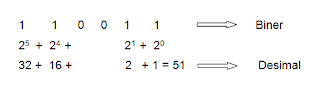
Sehingga bilangan biner 1100112 berubah menjadi bilangan desimal 5110.
Tabel 2.4. adalah contoh perubahan beberapa bilangan biner menjadi bilangan desimal.
Tabel 2.4. Contoh Pengubahan Bilangan Biner menjadi Desimal

Semoga bermanfaat....
Selamat belajar......




























 adalah reaktansi kapasitif.
adalah reaktansi kapasitif.
 dan arus yang mengalir dalamm rangkaian
dan arus yang mengalir dalamm rangkaian  Dengan hukum kirchoff didapatkan
Dengan hukum kirchoff didapatkan
 dan
dan  Bagaimana menentukann nilai arus dalam rangkaian im dan fase shi?
Dengan menggunakan diagram fasor maka jumlah vektor amplitudo-amplitudo dafasor VR, VL dan VC menghasilkan sebuah fasor dengan amplitudo Em yaitu:
Bagaimana menentukann nilai arus dalam rangkaian im dan fase shi?
Dengan menggunakan diagram fasor maka jumlah vektor amplitudo-amplitudo dafasor VR, VL dan VC menghasilkan sebuah fasor dengan amplitudo Em yaitu:








